자율주행과 로봇제어 운영체제 워크숍-ROS 워크숍 입문
2020년 5월 30일 토요일 오전 10:00 ~ 오후 5:00 판교 제2테크노밸리 기업지원 허브
오로카(오픈소스 소프트웨어&하드웨어로봇 기술 공유 카페) 판교 모임이 있다며 카카오톡 룸, 슬랙 룸 모두 들어섰다.
단체방에서 터틀봇? ROS? 가제보? 이래서 무슨 말인지 하나도 못 알아들었어.
모임에서 ROS(Robot Operating System) 기초수업을 한다고 해서 신청해 수업을 받았다.
미트업 정보: 자율주행과 로봇제어를 위한 OS 워크숍 ROS Workshop ROS 로보트 OS 하루에 개념을 정립 https://www.meetup.com/ko-KR/Design-Make-Share-in-Seongnam-KR/events/270252984/2020년 5월 30일 (토) 오전 10:00:00:00:00 [커뮤니티소개] 오로카판교지역 모임은 자율주행과 로봇제어 관련 회사가 많은 판교지역에서 로봇운영 시스템인 ROS를 공부하고 있습니다. ROS뿐만 아니라 아두이노, 라즈베리 파이, 3D 프린터를 기반으로 한 메이킹 문화를 만들려고 합니다.[오로카카페] https://cafe.naver.com/openrt [ROSwww.meetup.com
강의실 가는 길(지각하고 점심시간에 찍은 사진)

기업지원허브3층

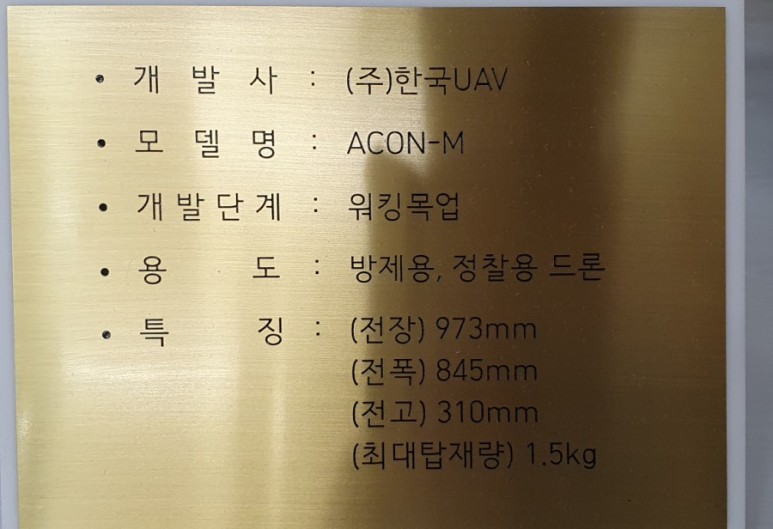
여기 드론이 많아

수업자료 https://robertchoi. gitbook.io/ros/ 아두이노보드를 활용하여 초보자를 위한 간단한 ROS 입문서를 정리하였습니다. robertchoi.gitbook.io 여기 있는 ROS의 간단한 소개 ROS(Robot Operating System)는 2007년 5월 모건 퀴글리(AI Robod STARanford)에서 시작한 인공 STAGan Quigley.
2007년 11월 윌로우 개리지(Willow Garage)가 이어받아 ‘ROS’라는 이름으로 개발을 시작해 2010년 1월 ROS 1.0을 출시했다.
이후 2013년부터 Open Source Robotics Foundation이 개발 관리하다가 2017년 5월부터 Open Robotics로 개명했다. 2017년 12월에는 ROS 2.0을 출시했다.https://robertchoi.gitbook.io/ros/1- 수업에서는 ROS1.0으로 진행됐다.
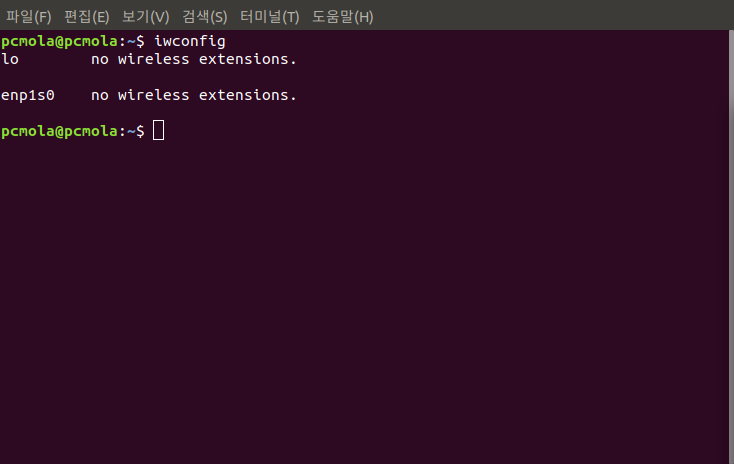
수업가기 전: 아무리 해봐도 와이파이 랜 어댑터를 잡을 수 없다.
와이파이 포기하고 그냥 많이 님 들고 판교 고고

Wi-Fi 연결된 휴대전화로 공유기에 USB 테더링을 하여
라우터에서는 노트북에 유선 LAN 케이블을 접속.
다음은 수업시간에 여러 가지 해 본 화면.

ROS 설치 중
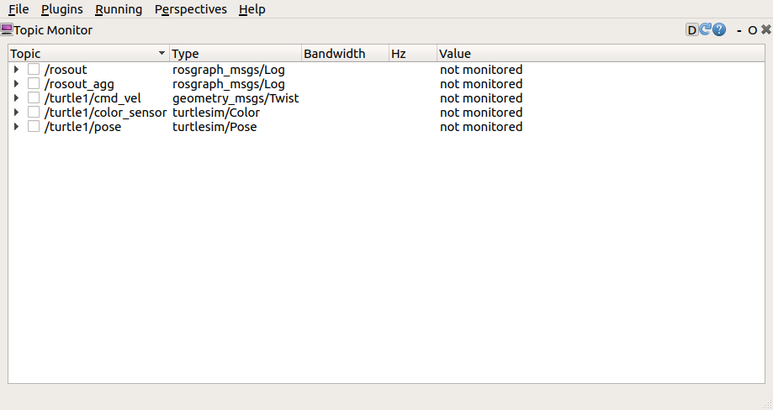
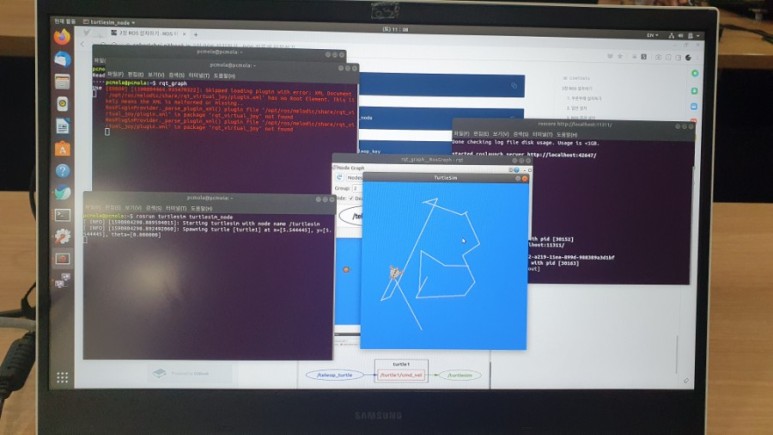
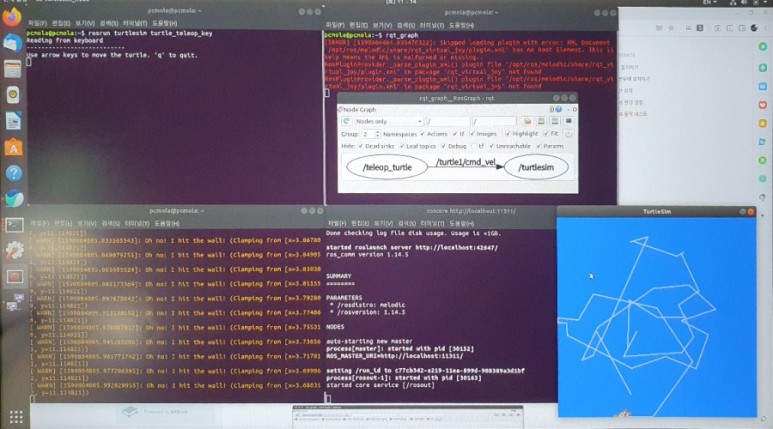
roscore , rosrun turtlesim , r qt _ graph 실행
ROS 할 때 작업할 때마다 창 1개씩 올려야 된대- 거북이가 움직이는 화면을 하나 띄우려면 최소 4개의 창은 띄워야 했다. roscore 프로그램, 거북이가 움직이도록 띄우는 콘솔창, 콘솔창에서 뜨는 거북이 지도창, 그리고 키보드로 핸들링 하는 창. 여기서는 좌표가 보이는 창과 프로그램 간의 관계를 Diagram으로 표시하는 창(rqt)도 표시한 상태.
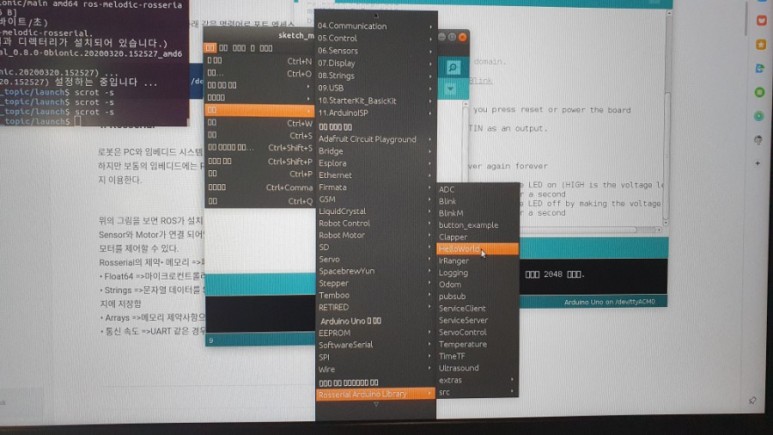
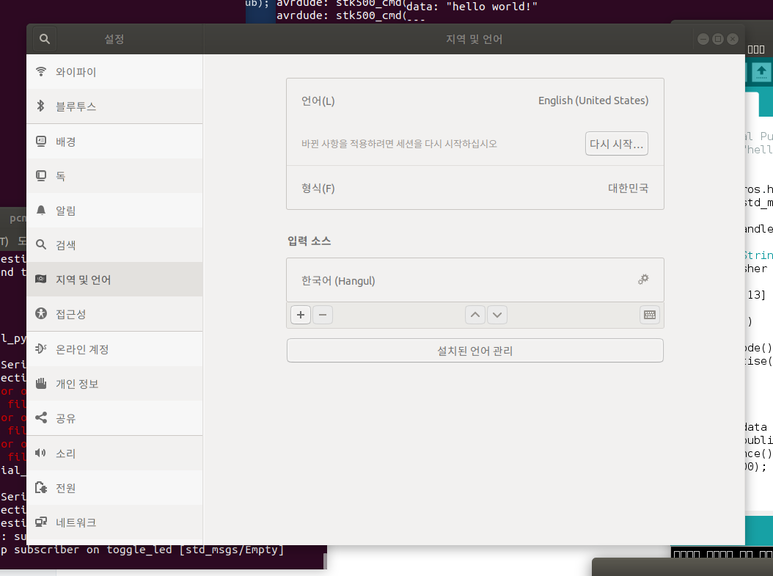
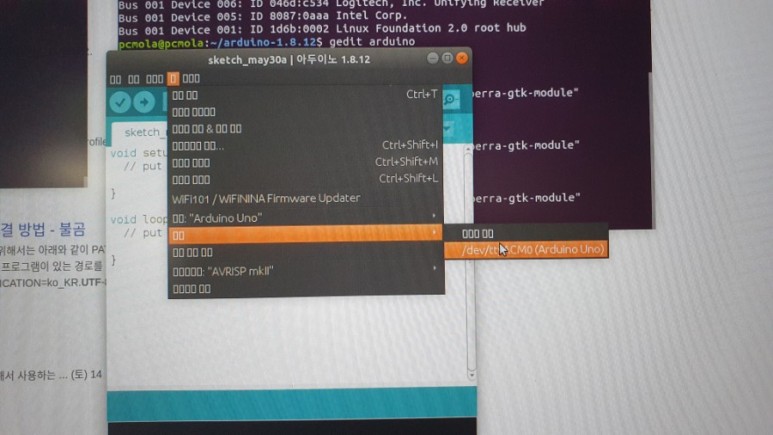
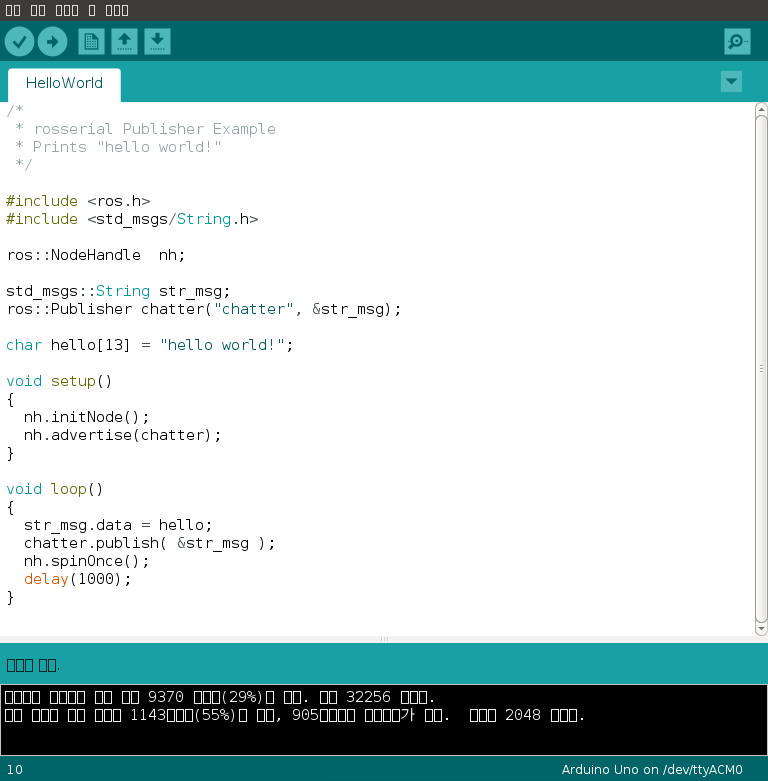
ROS<>아두이노도 실습을 했다.한글이 깨져서 몇 번째 메뉴의 몇 번째를 클릭하면 되는지 설명을 들으며 진행했다.



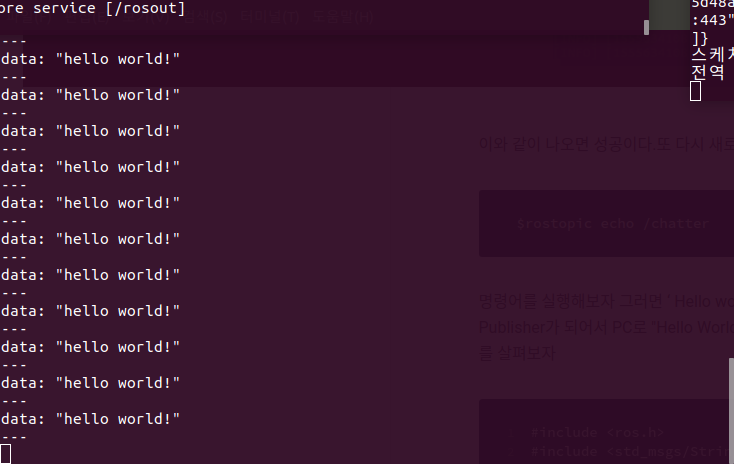
ROS를 통해 아두이노로 데이터를 수신한 화면

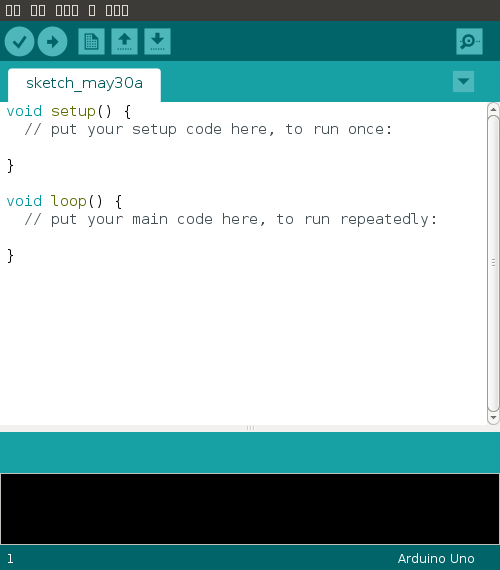
ROS – 아두이노용 hello w orld

나중에 옆자리 분이 영어로 메뉴를 바꾸라고 해서 물어봤더니 우분투 언어 설정을 영어로 바꾸면 된대.혼자 하면 완전 삽질했는데꿀팁을 얻었네.
이거 캡처를 했는데… 뭔지 기억이 안 나네
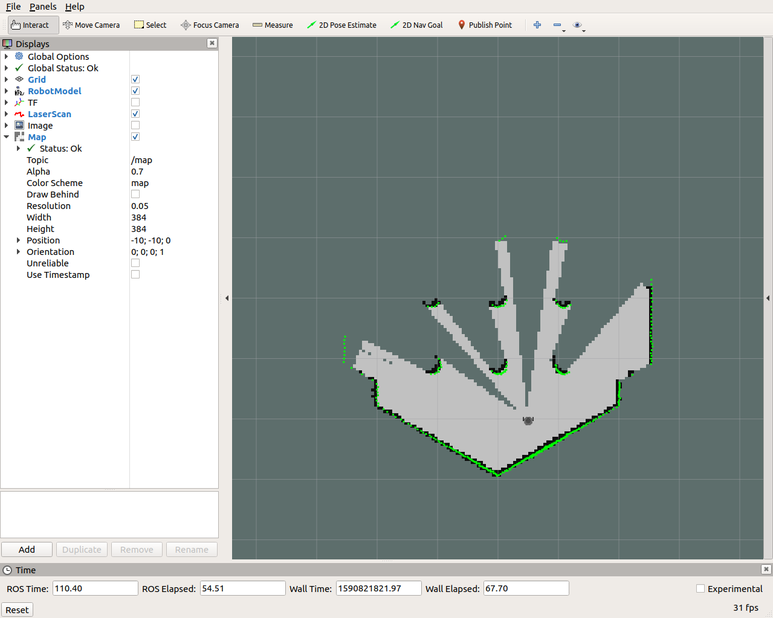
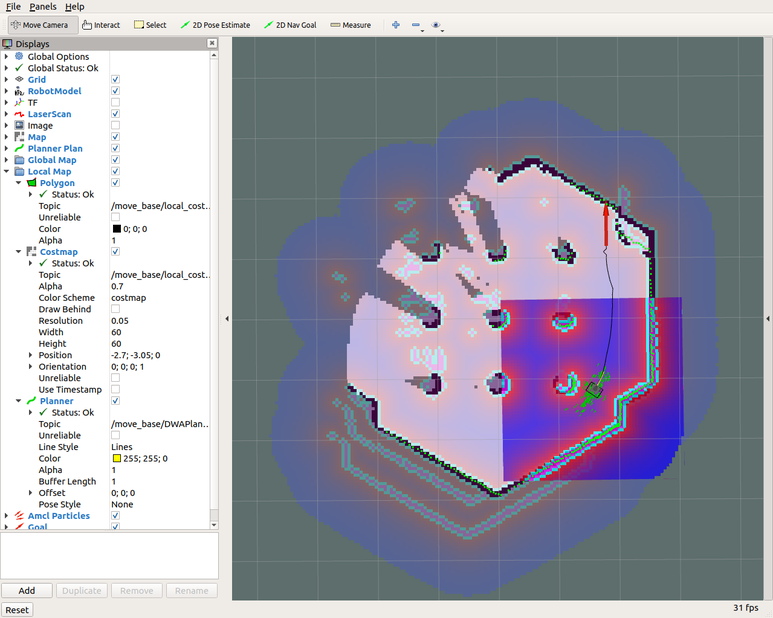
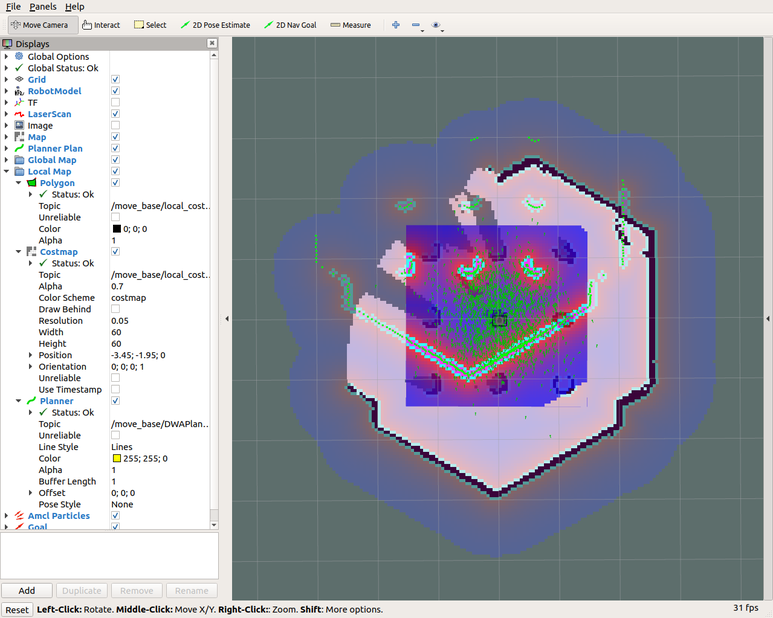
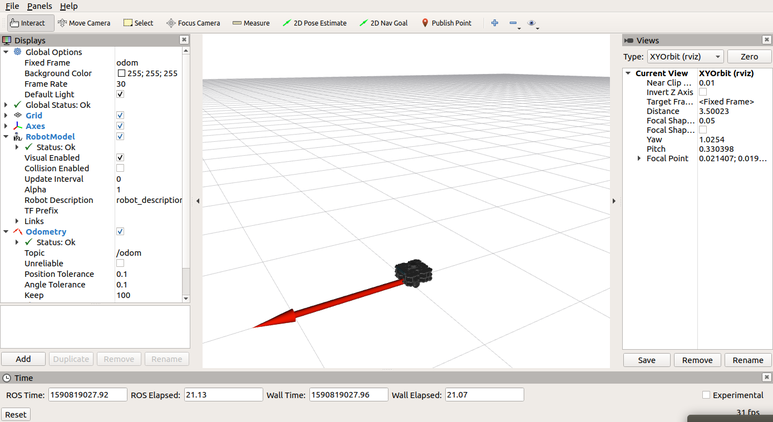
Rviz ( ROS – visualization ) 실습
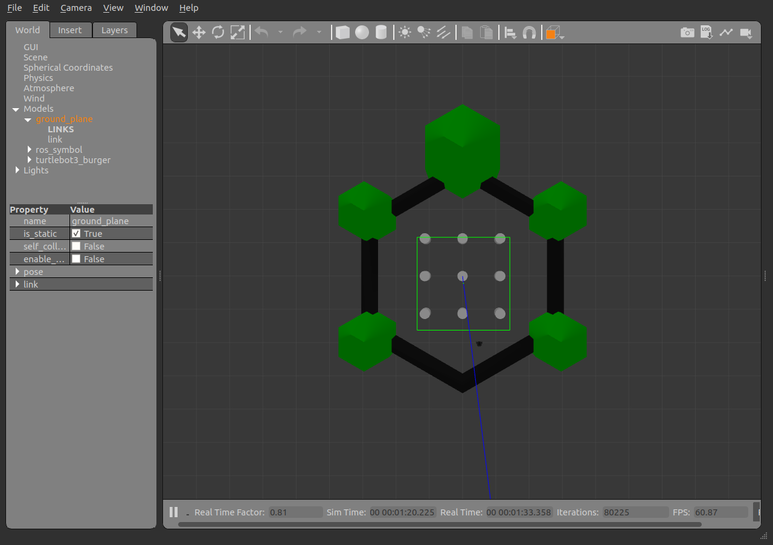
SLAM(Simultaneous Loca lization And Mapping)이것이 가제로 보였는가. 아무튼 터틀봇3 시뮬레이터 실행
큰 거북이 속의 작은 점이 실제로 주행하는 터틀봇으로 동그라미가 기둥이라고 한다. 이곳을 돌아다니며 학습을 시킨 후에는 자율주행이 된단다.
터틀봇3 SLAM 실행
터틀봇과의 조합 앞

키보드 조절이 잘 안 돼서 터틀봇이 전체를 못 돌았어 아 영상 찍었어야 되나?
터틀봇이랑 맵 맞추고 나서
수업은 여기까지.
쉬는 시간에 나와서 찍은 사진
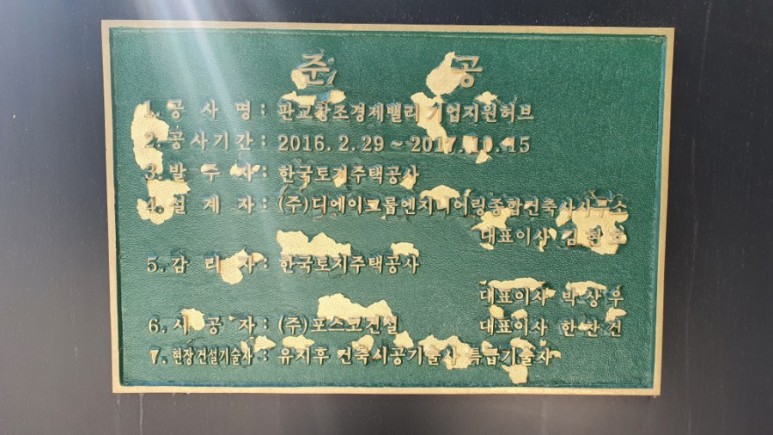
판교 창조경제밸리 기업지원 허브


토요일이니까 이 큰 건물에 우리만 있었던 것 같아
강의 후기 선생님께서 혼자 1년 동안 삽질을 하면서 배운 내용이라고 하셨는데 혼자 하기는 정말 힘들 것 같아.
나도 처음에 라즈베리 파이 화면 하나 올리는데 2주 걸렸어.
큰 그림의 개념을 잡을 수 있었던 매우 유익한 교육이었다.잠깐만 근데 가재보가 수업에 있었나?아직 가재보가 뭔지 잘 모르겠어또 대회 때는 젯슨 나노? 그런 게 있어야 되는데 아직 멀었네.
귀중한 토요일을 통째로 비웠는데 큰 도움이 되었다.집으로 돌아오는 길에 교통체증으로 지쳐버렸는데.. 막히는 동부간선도로를 피해서 간 곳이 KTX 수서역인데 그곳이 그렇게 헬 줄은 처음 알았어.
선생님이 오로카 5번째 아니면 6번째 가입 멤버라고 하네요드론 쪽에 조예가 깊을 것 같아.
로봇학과? 학생들도 많이 왔네교수와 학생 2명이 함께 온 팀도 있었고 대전에서 차를 끌고 온 사람도 있었다.
드론을 만져보신 분도 계시고 선생님이랑 많은 얘기를 하셨어나만 빼놓고는 조금씩 뭔가 해본 사람이 많아.(수강생은 총 10명)
다음 수업은 터틀봇이 필요하대60만원이라고 하던데.역시 사야죠.
ROS의 첫발을 내디뎠으니 ROS2도 설명을 보고 한번 따라해보자.